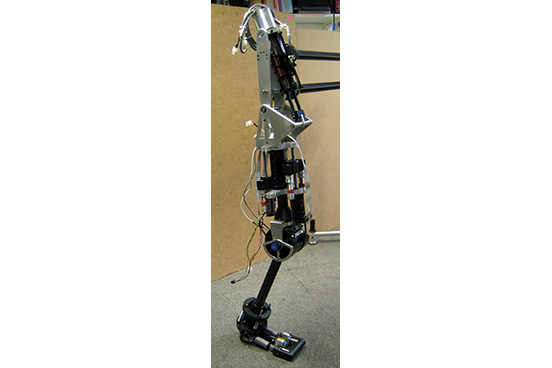
Stored energy Leg
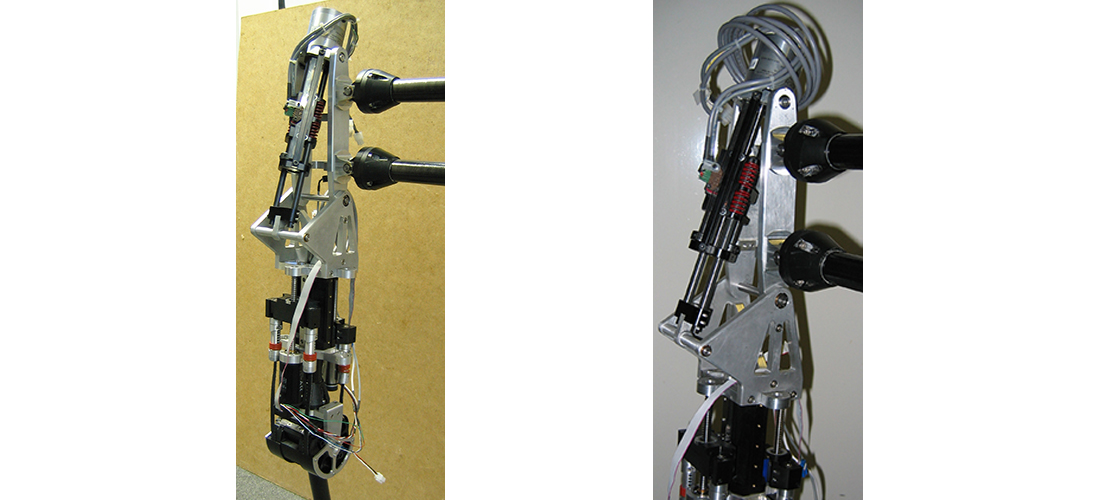
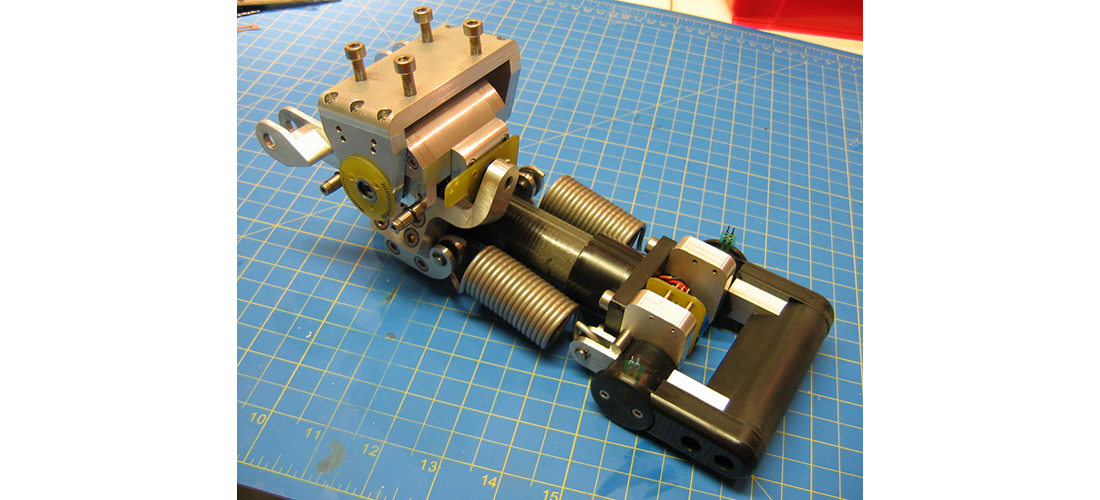
Lower limb with serious elastic actuation. This was developed for the University of Sussex as an investigation into passive dynamics.Robotic lower limbs were developed for the University of Sussex to aid their research into very low energy strategies for human-like walking robots inspired by human ambulation; such as passive dynamic behaviour facilitated by variable mechanical impedance actuation. Elumotion supplied original foot and ankle, knee and hip designs for this project including mechanical methods for elastic energy storage, all of which were prototyped totally ‘in-house’